Open Science
We are committed to disseminating our knowledge and research products to the scientific community and the public. Our research implementations are available on our Github page (https://github.com/intuitivecomputing). Also, check out our Youtube page for research talks and demo videos.
Demoshop: An Interactive Robot Programming Tool for Authoring and Editing Task Demonstrations
 Github page | Related publication | Video demo
Github page | Related publication | Video demo
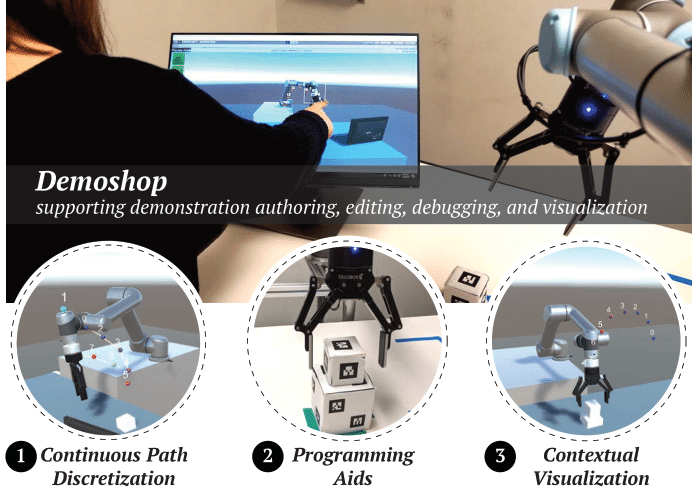
Just as end-user programming has helped make computer programming accessible for a variety of users and settings, end-user robot programming has helped empower end-users to develop custom robot behaviors. While end-user robot programming methods such as kinesthetic teaching have introduced direct approaches to task demonstration that allow users to avoid working with traditional programming constructs, everyday people still have difficulties in specifying effective robot programs using demonstration methods due to challenges in understanding robot kinematics and programming without situated context and assistive system feedback.
Demoshop is an interactive robot programming tool that includes visualization tools and user-centric programming aids to help end-users develop and refine their task demonstrations more easily and effectively.
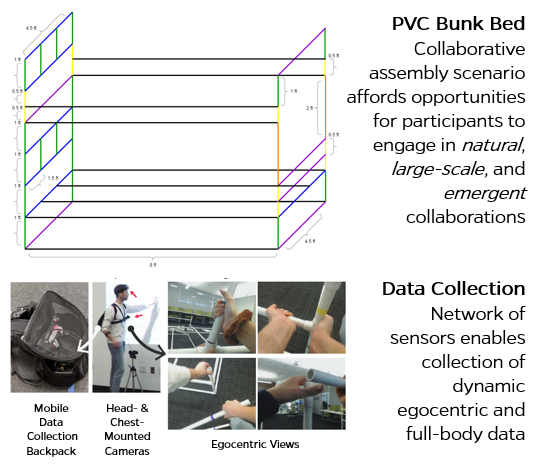
FACT: A Full-body Ad-hoc Collaboration Testbed for Modeling Complex Teamwork
 Github page | Related publication
Github page | Related publication
Robots are envisioned to work alongside humans in applications ranging from in-home assistance to collaborative manufacturing. Research on human-robot collaboration has helped develop various aspects of social intelligence necessary for robots to participate in effective, fluid collaborations with humans. However, HRC research has focused on dyadic, structured, and minimal collaborations between humans and robots that may not fully represent the large scale and emergent nature of more complex, unstructured collaborative activities. FACT (Full-body Ad-hoc Collaboration Testbed) is an openly accessible resource for researchers to better model natural, ad-hoc human collaborative behaviors and develop robot capabilities intended for colocated emergent collaborations.
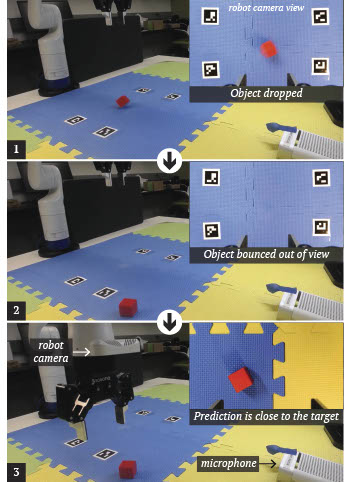
Dataset: Audio-Visual Representations of Object Drops
 Dataset | Bu, Fanjun; Huang, Chien-Ming, 2020, "Dataset: Audio-visual representations of object drops", https://doi.org/10.7281/T1/EP0W7Y, Johns Hopkins University Data Archive, V1
Dataset | Bu, Fanjun; Huang, Chien-Ming, 2020, "Dataset: Audio-visual representations of object drops", https://doi.org/10.7281/T1/EP0W7Y, Johns Hopkins University Data Archive, V1
Github page | Related paper | Video demo
As robots perform manipulation tasks and interact with objects, it is probable that they accidentally drop objects that subsequently bounce out of their visual fields (e.g., due to an inadequate grasp of an unfamiliar object). To enable robots to recover from such errors, we draw upon the concept of object permanence—objects remain in existence even when they are not being sensed (e.g., seen) directly. This dataset was created to address the above challenge. The data was collected by having a Kinova Gen3 Robot Arm repeatedly pick up a wooden cube (3cm x 3cm x 3cm) and release the cube 0.3 meters above a table surface. A 7-channel microphone array was used to record the impact sound from when the robot gripper opened to drop the cube. A camera mounted on the robot’s wrist observed the beginning of the cube’s trajectory before the cube bounced out of view, and a ceiling camera recorded the rest of the trajectory. Audio recordings were saved as WAV files, and the cube’s trajectory was saved as NumPy arrays, with two versions: the partial trajectory observed from the robot wrist camera and the complete trajectory obtained by merging two partial trajectories.
PySocialForce: A Python Implementation of the Extended Social Force Model for Pedestrian Dynamics
 Github page | Related publication (available soon)
Github page | Related publication (available soon)
Modeling pedestrian dynamics has a variety of valuable applications, ranging from emergency simulation and urban planning to crowd simulation in video games and movies. Pedestrian simulation also plays an important role in developing mobile robots that are capable of navigating crowded human environments in a safe, efficient, and socially appropriate manner.
PySocialForce is a pure Python package for simulating crowd dynamics based on the extended social force model. While it can be used for general crowd simulation, it is designed with social navigation applications in mind. Our Python implementation makes it easily extensible (e.g., adding new custom “social forces”) and able to interface with modern reinforcement learning environments (e.g., OpenAI Gym).
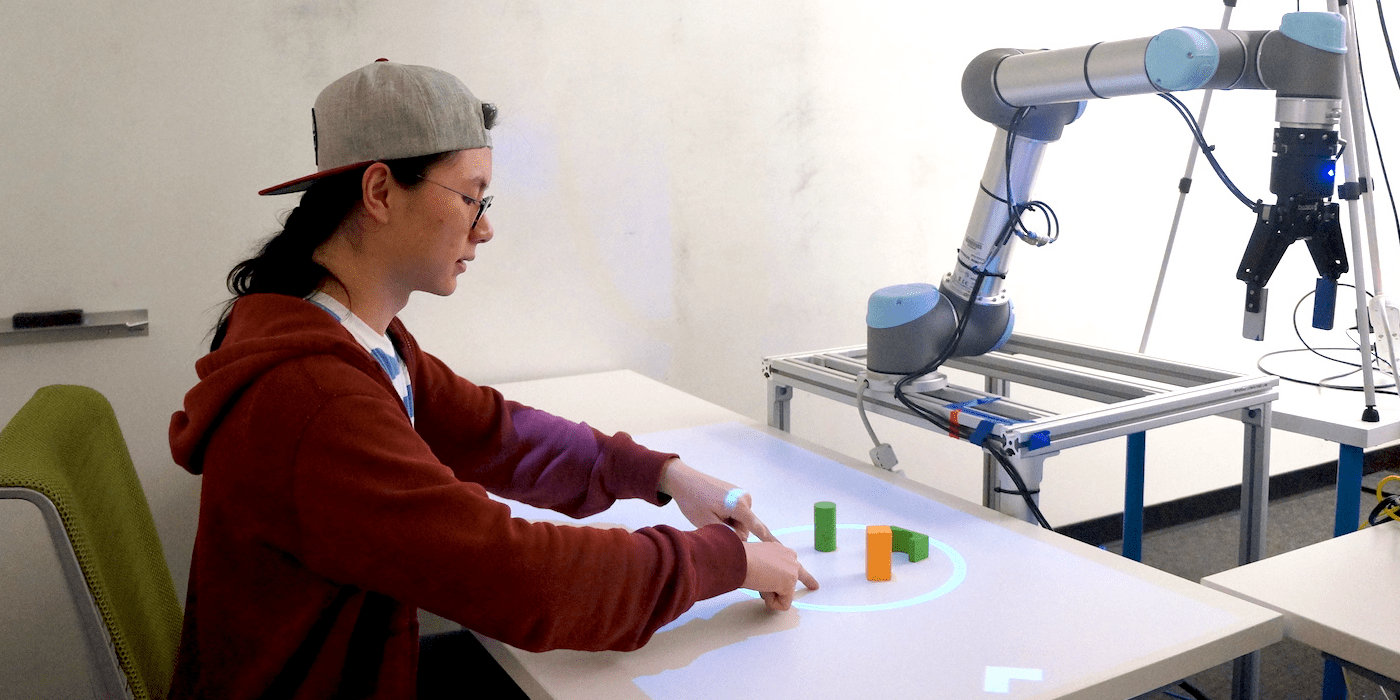
PATI: A Projection-Based Augmented Table-Top Interface for Robot Programming
 Github page | Related publication
Github page | Related publication
As robots begin to provide daily assistance to individuals in human environments, their end-users, who do not necessarily have substantial technical training or backgrounds in robotics or programming, will ultimately need to program and “re-task” their robots to perform a variety of custom tasks.
PATI allows users to use simple, common gestures (e.g., pinch gestures) and tools (e.g., shape tools) to specify table-top manipulation tasks (e.g., pick-and-place) for a robot manipulator. It further enables users to interact with the environment directly when providing task specifications; for example, users can utilize gestures and tools to annotate the environment with task-relevant information, such as specifying target landmarks and selecting objects of interest.